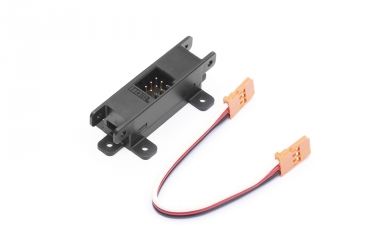
Futaba R404SBS-E Empfänger
 nicht verfügbar") Dieser Artikel ist in Ihrer Region (Vereinigte Staaten) nicht verfügbar
Dieser Artikel ist in Ihrer Region (Vereinigte Staaten) nicht verfügbar
Zehnkanal-Empfänger Futaba des Übertragungssystems F-4G 2,4 GHz mit superschneller Reaktion und vollständiger Telemetrie für RC-Autos und -Boote. Er ist ausschließlich für den Einsatz in Modellen mit Elektromotor vorgesehen. Der S.BUS2-Anschluss für bidirektionale Kommunikation ermöglicht den Anschluss von S.BUS2-Servos für die Kanäle 5-10, Futaba-Telemetriesensoren, Gyroskopen oder anderen kompatiblen Geräten. Die Betriebszustände des Empfängers werden durch eine LED-Anzeige signalisiert.
Übertragungssystem F-4G
Futaba F-4G 2,4 GHz ist ein neues Übertragungssystem mit superschneller Reaktion, das die Übertragung von Telemetriedaten und bis zu 10 Kanälen ermöglicht. Auf den Kanälen 1-4 ist es möglich (je nach Einstellung am Sender jeder Kanal kann in einem anderen Modus arbeiten) ein Schmalbandsignal für Futaba-SR-Servos mit einer Wiederholungsfrequenz von 833 Hz (Pulsdauer 1 ms), für klassische Digitalservos mit einer Wiederholungsfrequenz von 333 Hz (Pulsdauer 3 ms) oder für Analogservos mit einer Wiederholungsfrequenz von 66 Hz (Periode 15 ms). Die Kanäle 5-10 werden als serielles Signal für S.BUS2-Servos mit einer Wiederholungsfrequenz von 66 Hz übertragen.
Stromversorgung
3,7-7,4 V (Nennspannung) – d. h. z. B. 4-6 Zellen NiMH, 1-2S LiPo/Li-Ion, 2S LiFe, BEC-Stromversorgungsstabilisatoren im angegebenen Spannungsbereich.
Antenne
Der Empfänger ist mit Diversity-Antennen ausgestattet, die in das Empfängergehäuse (in die „Rückenlehne” der „stuhlförmigen” Box) eingebaut sind. Aufgrund der begrenzten Reichweite ist er ausschließlich für Modelle mit Elektromotor vorgesehen und darf nicht in Modellen mit Verbrennungsmotor verwendet werden.
Empfängerausgänge, Kanalmodi
Der Empfänger ist mit Buchsen für Standard-Futaba-Stecker (mit Vorsprung) ausgestattet, in die natürlich auch UNI-Stecker (=JR/Graupner, Hitec) ohne seitlichen Vorsprung gesteckt werden können.
Kanalausgänge (PWM): Der R404SBS-E bietet 4 klassische PWM-Kanäle.
S.BUS2: Die S.BUS2-Buchse ermöglicht den Anschluss von S.BUS2-Servos für die Kanäle 5-10, Futaba-Telemetriesensoren, deren Daten auf dem Sender angezeigt werden können, Gyroskope/Stabilisierungseinheiten oder andere Geräte.
Telemetrie
Der R404SBS-E überträgt Daten zur Versorgungsspannung des Empfängers an den Sender, ohne dass Sensoren angeschlossen werden müssen.
Der R404SBS-E ermöglicht die Verwendung von Futaba-Telemetriesensoren und anderen Sensoren, die mit dem S.BUS2-Bussystem mit bidirektionaler Kommunikation kompatibel sind (die verwendbaren Sensoren hängen von den Möglichkeiten des Senders ab).
Aktualisierbare Firmware
Die Firmware des Empfängers kann drahtlos über den Sender aktualisiert werden.
Der Empfänger-Satz enthält: Empfänger R404SBS-E, Bedienungsanleitung.
Was ist S.BUS2/S.BUS?
- S.BUS – Futaba-Seriellbus mit unidirektionaler Kommunikation zur Steuerung von Servos, Reglern, Schaltern, Gyroskopen und anderen kompatiblen RC-Geräten, die an einen einzigen S.BUS-Ausgang des Empfängers angeschlossen sind.
- S.BUS2 – Futaba-Seriellbus für bidirektionale Kommunikation, der (wie S.BUS) die Steuerung von Servos, Reglern, Schaltern, Gyroskopen und anderen kompatiblen RC-Geräten ermöglicht, die an einen einzigen S.BUS2-Ausgangs-/Eingangsport des Empfängers angeschlossen sind. Darüber hinaus ermöglicht er den Anschluss von Telemetriesensoren und die Übertragung der von ihnen erfassten Daten über den Empfänger zur Anzeige auf dem Sender; einige S.BUS2-Servos können Informationen über Betriebsstrom, Temperatur oder Winkel des Servoausgangshebels an den Sender übertragen.
Im Gegensatz zu herkömmlichen RC-Sets verwendet das S.BUS(2)-System serielle Datenkommunikation zur Übertragung von Steuersignalen vom Empfänger zu Servos, Gyroskopen oder anderen Geräten. Diese Daten enthalten Befehle wie „Servo Kanal 3 auf Position 15 Grad bewegen, Servo Kanal 5 auf Position 30 Grad bewegen” für mehrere Geräte. S.BUS(2)-Geräte führen nur Befehle aus, die ihrem eigenen eingestellten Kanal zugeordnet sind. Aus diesem Grund ist es möglich, mehrere Servos an dasselbe Signalkabel anzuschließen und sie dennoch einzeln nach Bedarf einzustellen und zu steuern. Dazu dient der Identifikationscode des Servos (ID). Die ID finden Sie auf dem Aufkleber auf der Verpackung des Servos.Das S.BUS2-Servo kann sowohl an den S.BUS2- als auch an den S.BUS-Anschluss des Empfängers angeschlossen werden. Seine Funktion wird durch die Einstellung des Kanals im Servospeicher festgelegt (dies erfolgt über die Programmierschnittstelle des Futaba-Senders, den SBC-1-Programmierer oder die USB-Schnittstelle CIU-3 mit dem PC-Programm S-Link – bei einigen Servos kann der Kanal nur mit Hilfe des Senders eingestellt werden).
Ein S.BUS- oder S.BUS2-Servo, das an den Kanalausgang eines klassischen Empfängers (PWM) angeschlossen ist, funktioniert wie ein klassisches Servo. Seine Bewegung wird durch das Signal im Kanal des Empfängers bestimmt, an den es angeschlossen ist. Die Einstellung der programmierbaren Servofunktionen bleibt gültig.
| Modulation/Kodierung | F-4G 2.4GHz |
| Anzahl der Kanäle | 10 |
| Funktion | Fail-safe,Telemetrie |
| Stromversorgung (jmenovité napětí) | 4.8V,6V,7.2V,7.4V,3.7V,6.6V |
| Länge [mm] | 25.5 |
| Breite [mm] | 20.7 |
| Höhe [mm] | 10.6 - 30.5 |
| Gewicht [g] | 7.2 |
| Serienausgang | S-BUS2 |